
桌上型機械手臂的基本結構是什麼?
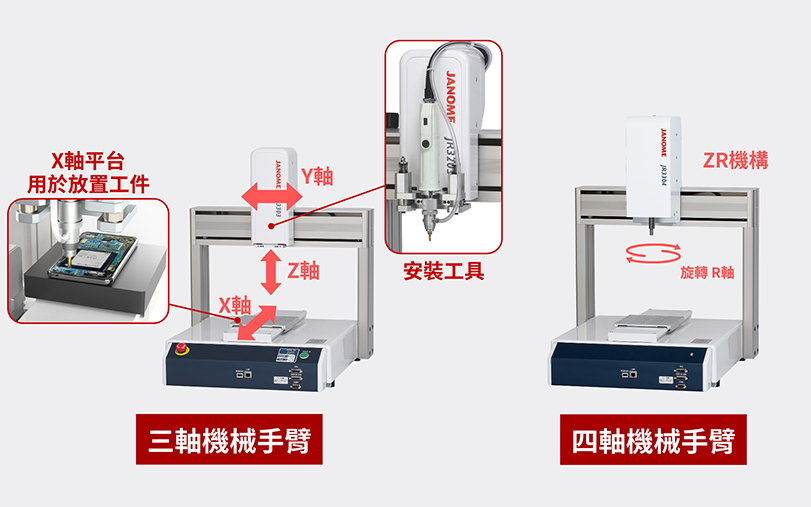
桌上型機械手臂是採用直角坐標系的三軸或四軸(包含R旋轉軸)的自動化設備。
其結構為:工件(加工對象)放置於X軸平台上,X軸負責前後移動,工具則透過Y軸左右移動,Z軸則實現上下移動。
各個軸向皆由步進馬達驅動,實現高精度的定位與移動控制。
桌上型機械手臂的主要應用實例與適用的生產方式
JANOME的桌上型機械手臂提供五種不同尺寸(如下表所示),可根據實際用途與工件尺寸進行選型。
| 動作範圍 [mm] | 最大可搬重量 [kg] | ||||
|---|---|---|---|---|---|
| X | Y | Z | R ※ | 工件 | 工具 |
| 200 | 200 | 50 | ±360° | 7 | 3.5 |
| 300 | 320 | 100 | 15 | 7 | |
| 400 | 400 | 150 | |||
| 510 | 510 | ||||
| 510 | 620 | ||||
※以四軸機械手臂為例。
桌上型機械手臂的特點是需要將工件固定於X軸平台上,並透過平台移動來進行加工或操作。
如上表所示,標準規格的桌上型機械手臂無法對應質量超過15kg的工件,這一點在選型時需特別留意。
※若使用JR3000系列的可搬大重量規格,則可對應最大20kg的工件質量。
基於上述特性,桌上型機械手臂通常適用於單機獨立作業的單元式(Cell)生產模式。.
不過,近年來也有將其與協作型機械手臂(Cobot)結合,構成自動化生產線的案例;亦有多台桌上型機械手臂並列設置或與輸送帶(Conveyor)整合,以實現客製化自動化系統的應用方式。
【影片】JANOME自動化設備範例
桌上型機械手臂特別擅長處理小型工件的超高精度作業。
例如,密封膠或接著劑的微量塗佈就是最具代表性的應用之一。
其他典型的應用流程還包括以下幾種作業:
- 螺絲鎖附
- 烙鐵或雷射焊錫
- 電路板切割(高速主駎馬達切割方式)
- 透過影像辨識進行外觀檢查
- 插針壓入
- 利用常壓電漿進行表面處理
這些作業多數與一般的取放(Pick & Place)作業不同,
但例如將螺絲或插針等零件從料盤上取出後,精準安裝於工件上等流程,也能充分發揮桌上型機械手臂的靈活應用性。